SOCIAL
QUICK LINKS
CONTACT

Over 150 commands that implement the main stages
of 3D scanning data processing
Classifying and verifying ground
An algorithm for automatic ground identification, complemented by a ground verification command that allows for manual refinement of automatically classified points.
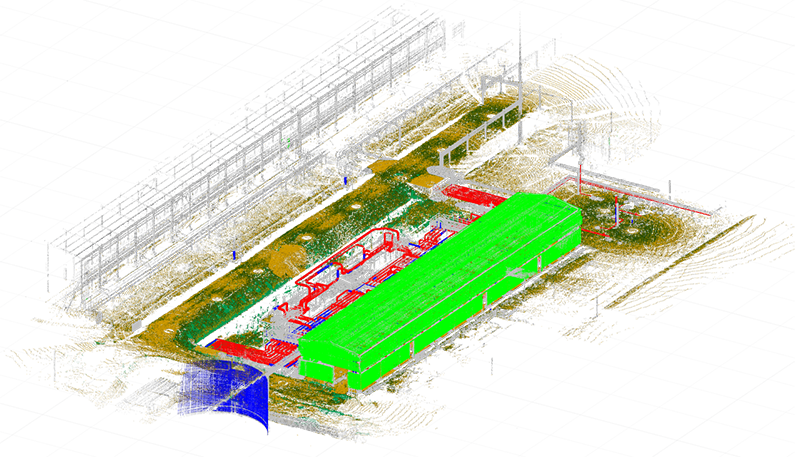
Classifying points and establishing named views
An extensive toolkit and parameters are available for the automatic classification of terrain and other categories based on specified criteria.
Layer-by-layer vectorization and floor plan generation
Automatic construction of multiple sections of point clouds at specified intervals, followed by their vectorization and the generation of raster images.
Creation and editing of 3D meshes
The command conducts 3D triangulation of volumetric object point clouds, creating meshes that can be used for triangulating buildings and other surface structures.
Global searching for features
The command identifies basic geometric shapes (plane, sphere, cylinder, cone, torus) within a point cloud.
Comparison of point clouds
The tool enables evaluation of the degree of alignment between two point clouds or between a point cloud and a model.
Registering point clouds by reference points with error control
Mutual orientation of multiple point clouds enables registration to identify transformation parameters for any number of reference point groups. Two techniques are employed: pairwise and iterative.
Show more features of nanoCAD 3DScan
